(来源:机械孟话)
行业点评
灵巧手:特斯拉机器人迭代最重要的方向,量产落地的“最后一厘米”
灵巧手是人形机器人实现精细化操作和智能交互的关键部件,与机器人“大脑”直接相关,其感知与反馈质量,直接决定了大脑模型的学习效率,可以说是机器人最重要的硬件之一。Optimus灵巧手的工程量约占人形机器人整机开发的一半,是历次迭代的核心重点方向。近期马斯克在All-In峰会强调:Gen3核心攻关在“手与前臂”,再次凸显“手”的战略地位。特斯拉发布最新金色Optimus视频中,灵巧手向精细化、仿生化迭代。一旦灵巧手优化完成,意味着核心硬件已趋近收敛,是机器人走向规模化量产的最后一环。
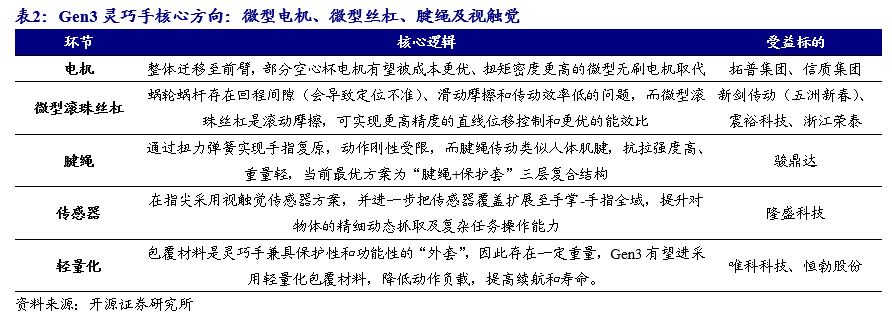
Gen3灵巧手核心:微型电机、微型丝杠、腱绳、 视触觉及轻量化
特斯拉灵巧手迭代重点在于更灵活、更强承载、更高感知,更加仿生和利于精细化操作。我们判断Gen3灵巧手主要有以下关键变化:
(1)电机:手掌内电机整体迁移至前臂,支持更高自由度设计,同时大幅降低维护复杂度。因空间限制解除,部分空心杯电机或被成本更优、扭矩密度更高的微型无刷电机取代,关注拓普集团、信质集团。(2)微型滚珠丝杠:替代蜗轮蜗杆,提升传动精度、负载与效率。当前方案尚未完全收敛,未来或采用“滚珠为主+关键指位滚柱”复合形式,延长寿命并增强承载力,关注新剑传动(五洲新春(维权))、震裕科技、浙江荣泰。(3)腱绳:腱绳套替代扭力弹簧。Gen2依赖扭力弹簧实现手指复原,Gen3转向腱绳传动,结构更接近人体肌腱,增强手指灵活性与动作自然度,有望采用“腱绳+保护套”结构方案,关注骏鼎达。(4)传感器:有望使用视触觉。传感器覆盖扩展至手掌与手指全域,并有望集成视触觉方案,叠加温度等多模态感知,具备更精细的动态抓取与复杂任务操作能力,关注隆盛科技。(5)轻量化:有望采用轻量化包覆材料。包覆材料是多功能集成层,是灵巧手兼具保护性和功能性的“外套”,因此存在一定重量,Gen3有望采用轻量化材料,在维持触感与摩擦力的同时显著减重,从而提升动作效率、续航与寿命,关注唯科科技、恒勃股份。
灵巧手商业模式优秀,或先于机器人整机放量;关注核心部件和头部整手公司
灵巧手技术壁垒高,涵盖硬件、算法与应用场景三大环节,同时直接影响机器人“大脑”的决策与训练。作为不同机器人形态的“共性模块”,灵巧手可独立存在,工业、医疗、生活服务等场景需求明确。目前技术尚未收敛,主要包括齿轮/直驱、腱绳、连杆三类:国内企业多采用连杆传动,耐久性高、动作可预测(傲意科技、因时机器人等);腱绳驱动自由度高,接近人手运动(帕西尼感知、灵巧智能等);齿轮/直驱结构简单、响应快(星动纪元等)。我们判断:(1)第三方整手企业有望凭借技术、赛道布局与上市公司合作以更快量产,如傲意科技等;(2)特斯拉、小米等头部大厂通常依靠核心供应链自研灵巧手;(3)部分具备技术协同性的电机、丝杠厂商有望向整手延伸(兆威机电、隆盛科技、震裕科技等)。
投资建议
(1)特斯拉:拓普集团、震裕科技、新剑传动(五洲新春)、隆盛科技、骏鼎达、恒勃股份、信质集团;(2)其他核心:雷迪克、丰立智能、兆威机电、荣泰健康。
宏观经济波动风险;机器人量产不及预期;供应链发展不及预期
1、 灵巧手:特斯拉机器人迭代最重要的方向,量产落地的“最后一厘米”
灵巧手是人形机器人实现精细化操作和智能交互的关键部件,与机器人“大脑”直接相关,其感知与反馈质量,直接决定了大脑模型的学习效率,可以说是机器人最重要的硬件之一。Optimus灵巧手的工程量约占人形机器人整机开发的一半,机器人实现穿针引线、拧螺丝、端水杯等泛社会化应用离不开灵巧手的优化迭代。同时,马斯克在All-In峰会强调:Gen3核心攻关在“手与前臂”。此次表态再次凸显“手”的战略地位。特斯拉发布最新金色Optimus视频中,灵巧手向精细化、仿生化迭代。一旦灵巧手优化完成,意味着核心硬件已趋近收敛,成为产业量产的最后一环。
我们认为灵巧手是特斯拉Gen3迭代的重点,也是不同机器人形态的“共性模块”,具备独特的商业化潜力,特斯拉的核心方向为微型电机、微型丝杠、腱绳及视触觉,国内关注与第三方整手企业合作的上市公司、布局灵巧手的核心部件厂商。
2、 Gen3灵巧手核心方向:微型电机、微型丝杠、腱绳、视触觉及轻量化
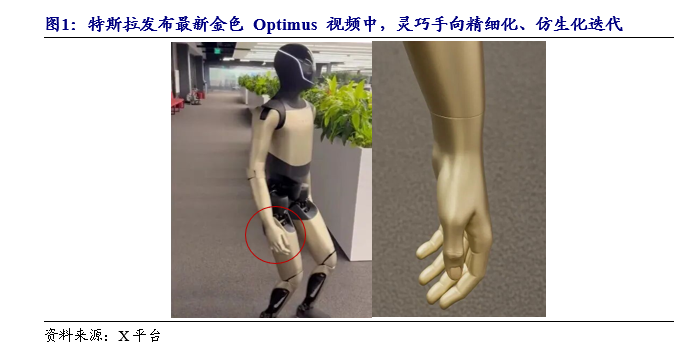
特斯拉灵巧手方案迭代代表行业方向,核心重点在更灵活、更强承载、更高感知。Gen3灵巧手单手自由度提升至22个,同时手腕/前臂拥有3个自由度,接近人手,价值量同步提升。我们判断Gen3硬件端迭代主要有以下关键变化:
(1)电机:整体迁移至前臂,部分空心杯电机有望被微型无刷电机取代。灵巧手要达到马斯克提出的“接近人类操作能力”的目标,就需要有更高的灵活度,手掌内电机整体迁移至前臂,可以释放空间与重量,灵巧手在实现高自由度设计的同时,动作控制将更稳定,尤其是捏起细小物体、快速切换抓握姿态等复杂操作,此外维护复杂度也将大幅降低。Gen3 机型定型后,特斯拉将在其工厂进行大规模制造测试,这对硬件的成本提出了要求,因空间限制解除,部分空心杯电机有望被成本更优、扭矩密度更高的微型无刷电机取代。
核心标的:拓普集团、信质集团。

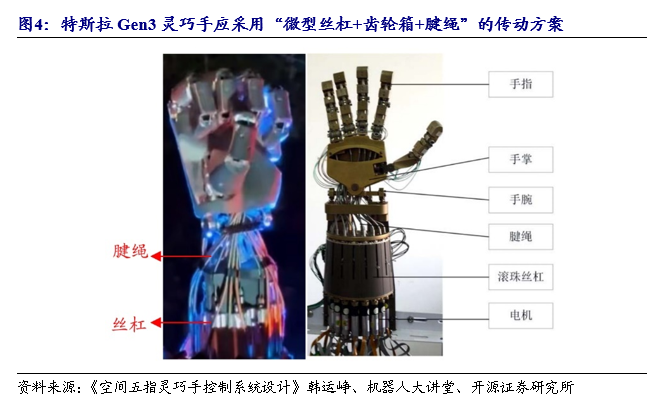
(2)微型滚珠丝杠:特斯拉Gen3灵巧手应采用“微型丝杠+齿轮箱+腱绳”的传动方案。Gen1灵巧手采用蜗轮蜗杆的方案,但蜗轮蜗杆存在回程间隙(会导致定位不准)、滑动摩擦和传动效率低的问题,而微型滚珠丝杠是滚动摩擦,可实现更高精度的直线位移控制和更优的能效比,Gen3应采用“齿轮箱+丝杠+腱绳”方案,可明显提升灵巧手的精度、负载和效率。同时,当前方案尚未完全收敛,我们判断未来或将使用“滚珠为主+关键指位滚柱”复合形式,延长寿命并增强承载力。
核心标的:新剑传动(五洲新春)、震裕科技、浙江荣泰。
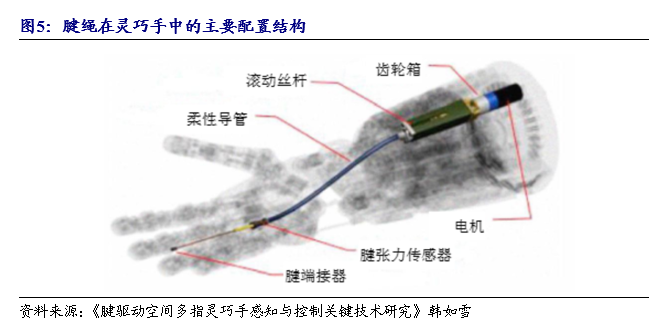
(3)腱绳:腱绳将取代扭力弹簧,有望采用“腱绳+保护套”结构。Gen2 灵巧手依赖扭力弹簧实现手指复原,动作刚性受限,Gen3转向腱绳传动,让机器人的操作方式真正向“人”靠拢。人体手指通过肌腱将力传递给指骨完成抓握、捏取等精细动作,腱绳传动类似人体肌腱,抗拉强度高、重量轻,可复现人类手指多关节的复杂运动,提升机器人手指的灵活性与动作自然度,有望采用“腱绳+保护套”结构方案。
核心标的:骏鼎达。
(4)传感器:有望采用视触觉传感、温度等多模态感知方案。Gen1灵巧手集成了力传感器,精准控制力度不压碎鸡蛋;Gen2在指尖引入触觉反馈,每个手指都配置了触觉传感器,我们认为Gen3将在指尖采用视触觉传感器方案,并进一步把传感器覆盖扩展至手掌-手指全域。借助传感器获取的位置、形状、柔软度、摩擦力及温度等数据,特斯拉可在仿真环境中持续训练控制算法,大幅提升对物体的精细动态抓取及复杂任务操作能力。
核心标的:隆盛科技。

(5)轻量化:有望采用轻量化包覆材料。包覆材料是多功能集成层,是灵巧手兼具保护性和功能性的“外套”,因此存在一定重量,我们认为Gen3有望进一步在灵巧手包覆层采用轻量化复合材料,在保证柔顺触感与摩擦力的前提下显著减轻重量,从而降低动作负载,提高续航和寿命。
核心标的:唯科科技、恒勃股份。
3、 灵巧手有望率先放量,国内百花齐放
我们认为灵巧手技术壁垒高,可独立本体单独销售,具备独特的商业化潜力,有望率先放量。灵巧手壁垒深厚,涵盖硬件、算法与应用场景三大环节,同时直接影响机器人“大脑”的决策与训练。作为不同机器人形态的“共性模块”,灵巧手甚至可独立存在,工业、医疗、生活服务等场景需求明确,商业化潜力独特。
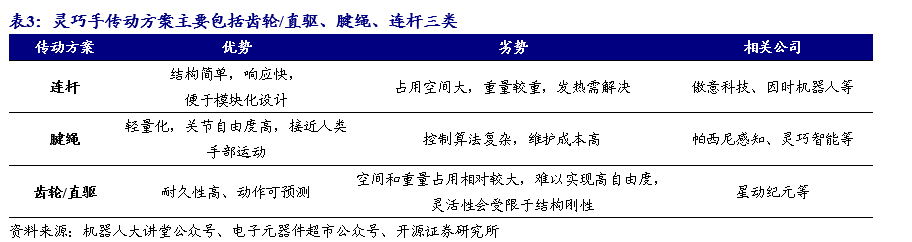
灵巧手方案尚未收敛,多技术并行,国内企业百花齐放。目前方案尚未收敛,主要包括齿轮/直驱、腱绳、连杆三类:国内企业多采用连杆传动,其优势在于耐久性强、运动轨迹稳定可控,常见于工业及高精度场景,代表企业包括因时机器人、强脑科技等;腱绳驱动柔顺性突出,更贴近人手的生物力学特性,适于需柔性交互的任务,企业主要为傲意科技、帕西尼感知等;齿轮/直驱方案结构简单,响应迅速,代表公司为星动纪元。
4、头部大厂自研,第三方整手企业加速崛起
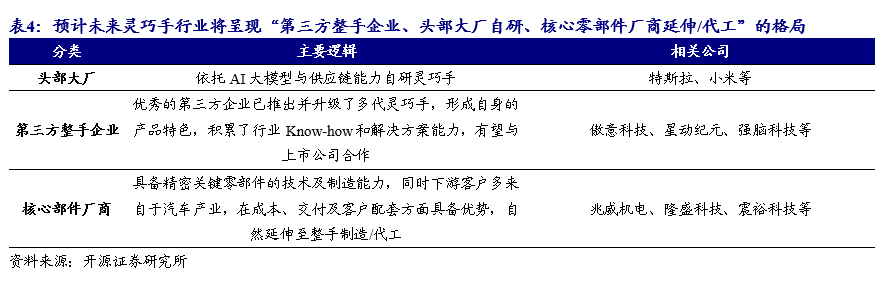
我们判断,未来灵巧手行业将呈现“第三方整手企业、头部大厂自研、核心零部件厂商延伸/代工”的多元化发展格局:
(1)特斯拉、小米等头部大厂通常依靠核心供应链自研灵巧手;
(2)第三方整手企业有望凭借技术、赛道布局与上市公司合作以更快量产,如傲意科技、星动纪元、强脑科技等;
(3)部分具备技术协同性的电机、丝杠厂商有望向整手延伸(兆威机电、隆盛科技、震裕科技等)。
4.1、第三方整手企业:加速崛起,与上市公司深度合作
傲意科技:与荣泰健康合作。灵巧手出货量最高之一,人机交互神经接口开拓者,商业化能力和全球化布局领先。傲意科技是国内少数拥有脑机接口和机器人底层技术逻辑的企业,以肌电手环起家,2024年推出第一款灵巧手,目前已拥有智能仿生手OHand系列、机器人灵巧手ROHand系列在内的4款产品。公司把握医疗细分方向,实现国内灵巧手出货量最高之一,并在美国、中东、俄罗斯、印度等国家实现商业化。此外,公司还与荣泰健康战略合作,聚焦脑机交互及仿生机械手。未来将配合按摩机器人开发,并将非侵入式脑机接口技术引入消费级产品。

星动纪元:与丰立智能合作,灵巧手行业黑马,成立仅两年,产品交付超300台,软硬一体化全栈自研,同时还布局人形机器人产品。公司成立于2023年,定位通用具身智能体,坚持软硬一体化路径,产品包括人形机器人和灵巧手,灵巧手产品星动XHAND1采用全直驱方案,并集成触觉传感器获取三维力触觉和温度信息,可用于公司机器人产品和单独对外出售。2025年以来,公司产品整体交付超300台,落地场景包括工业物流、连锁零售等,海外市场占比已超过50%。星动纪元的A轮融资获得丰立智能跟投,同时双方已于2023年下半年开始合作,未来有望在人形机器人相关本体、组件等领域开展合作。

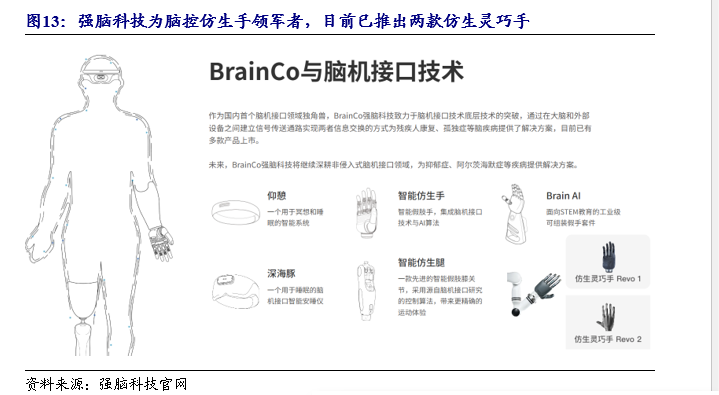
强脑科技:与领益智造合作,脑控仿生手领军者,非侵入式脑机接口技术全球领先,拓展灵巧手具备降维优势。公司孵化于哈佛大学创新实验室,是全球非侵入式脑机接口技术的头部企业之一,核心产品包括智能仿生手、智能仿生腿、工业仿生灵巧手等,灵巧手方面已推出Revo1和2两款产品,公司拥有极强的脑机接口底层技术,在交互与反馈、应用场景等方面可赋能,拓展灵巧手具备降维优势。强脑科技与领益智造基于灵巧手等具身智能机器人关键硬件开展合作,主要围绕软硬件共研、数据集构建、联合市场拓展等内容。
因时机器人:获科沃斯投资,灵巧手核心部件微型伺服电缸全国领先,强调高精度驱动与模块化,2025H1出货量超4000台。公司成立于2016年,聚焦灵巧手核心硬件,是微型伺服电缸的开创者(即现在的线性执行器),填补中国微小型直线伺服运动部件的市场空白,并早在工业及医疗领域实现规模化应用。依托该技术,公司推出了国内首款商业化量产五指灵巧手,产品包含RH56BFX系列和RH56DFX系列,在2025年上半年销量已突破4000台,商业化进程加速。因时机器人B2轮融资获科沃斯跟投,持股接近1%(2025H1数据),后续或将有业务合作。

帕西尼感知:获比亚迪投资,多维触觉技术领导者,推出集成视触觉的灵巧手DexH1,强调触觉与 AI 融合。帕西尼主攻聚焦多维触觉驱动的商用人形机器人研发,产品包括传感器、灵巧手和人形机器人。凭借领先的多模态触觉感知技术,公司推出了全球首款多维触觉+AI视觉双模态灵巧手DexH13。此外,帕西尼的MotionSharing DataBase采集多模态数据,为产品提供数据底座,提升灵巧手在多场景、多任务等复杂环境中的泛化能力。目前,帕西尼获得比亚迪超亿元战略投资,占股约 13%(截至2025年4月)。

4.2、核心部件厂商:借力技术优势,布局灵巧手制造与代工
具备核心部件业务的厂商有望延伸至整手制造/代工。灵巧手技术壁垒高,核心在于驱动、传动、感知三大系统,电机、丝杠厂商本身具备精密关键零部件的技术及制造能力,同时下游客户多来自于汽车产业,在成本、交付及客户配套方面具备优势,自然延伸至整手制造/代工,有望占据极佳的生态位,代表性企业如兆威机电、隆盛科技、震裕科技等。

5、 投资建议
灵巧手技术壁垒高,是人形机器人实现泛化操作与环境交互的关键,成为产业量产的最后一环。特斯拉Gen3灵巧手聚焦微型电机、微型丝杠、腱绳及视触觉传感等核心方向;国内有望呈现“第三方整手企业、头部大厂自研、核心零部件厂商延伸/代工”的格局,关注与第三方整手公司合作的上市公司、布局灵巧手相关业务的核心部件厂商。
推荐标的:(1)特斯拉:拓普集团、震裕科技、新剑传动(五洲新春)、隆盛科技、骏鼎达、恒勃股份、信质集团;(2)其他核心:雷迪克、丰立智能、兆威机电、荣泰健康。
6、 风险提示
宏观经济波动风险;机器人量产不及预期;供应链发展不及预期。
报告发布时间:2025年9月16日
免责声明
开源证券股份有限公司是经中国证监会批准设立的证券经营机构,具备证券投资咨询业务资格。
本报告仅供开源证券股份有限公司(以下简称“本公司”)的客户使用。本公司不会因接收人收到本报告而视其为客户。本报告是发送给开源证券客户的,属于商业秘密材料,只有开源证券客户才能参考或使用,如接收人并非开源证券客户,请及时退回并删除。
本报告是基于本公司认为可靠的已公开信息,但本公司不保证该等信息的准确性或完整性。本报告所载的资料、工具、意见及推测只提供给客户作参考之用,并非作为或被视为出售或购买证券或其他金融工具的邀请或向人做出邀请。本报告所载的资料、意见及推测仅反映本公司于发布本报告当日的判断,本报告所指的证券或投资标的的价格、价值及投资收入可能会波动。在不同时期,本公司可发出与本报告所载资料、意见及推测不一致的报告。客户应当考虑到本公司可能存在可能影响本报告客观性的利益冲突,不应视本报告为做出投资决策的唯一因素。本报告中所指的投资及服务可能不适合个别客户,不构成客户私人咨询建议。本公司未确保本报告充分考虑到个别客户特殊的投资目标、财务状况或需要。本公司建议客户应考虑本报告的任何意见或建议是否符合其特定状况,以及(若有必要)咨询独立投资顾问。在任何情况下,本报告中的信息或所表述的意见并不构成对任何人的投资建议。在任何情况下,本公司不对任何人因使用本报告中的任何内容所引致的任何损失负任何责任。若本报告的接收人非本公司的客户,应在基于本报告做出任何投资决定或就本报告要求任何解释前咨询独立投资顾问。
>>>查看更多:股市要闻
