作者:徐慧雄、者斯琪
摘要
■ 投资逻辑
观点一:智驾平权 2.0,支撑智驾赛道全年高景气度。
展望 2026 年整车行业面临补贴退坡、原材料涨价等多重压力,市场担心主机厂对智能驾驶功能是否会减配。我们研究发现 26 年智驾平权趋势非但不会放缓,而是会进入2.0 阶段,城市 NOA(领航辅助驾驶功能)开始走向千家万户,背后的原因在于:1)过去 2-3 年智驾景气度的本质来源是新能源车内卷背景下的主机厂增配,这一强大的供给端驱动力在 2026 年依然存在并且增强。2)小鹏 Mona 已经证明 10-20w 低价格带消费者对优质智驾功能同样具有需求。在供给和需求双重驱动力下,我们测算 2026 年城市 NOA 硬件配置渗透率有望从 2025 年 16%提升至 25%,全年搭载城市NOA 功能硬件配置销量有望达到545 万,同比增速超过 50%。
观点二: L2 进入强监管政策周期, L3/L4 法规体系逐步建立。
1)L2 强监管政策周期下检测类机构充分受益:L2 强标是强监管政策落地最重要的执行依据,目前已进入报批阶段。此次我国 L2 强覆盖范围广、所涉及检测车型多;同时由于测试严格程度强、检测项目多,预计单次检测价值量较高;因此我们预计,在 L2 强标正式落地后,将带来检测行业市场空间容量明显扩容。
2)我国 L3/L4 级自动驾驶正从地方性试验测试向全国性自动驾驶法规体系的建立迈进。2025 年5 月,在国务院发布的《国务院 2025 年度立法工作计划》明确将《道交法》修订列为拟提请全国人大常委会审议的法律案;包括《自动驾驶系统安全要求》在内的一些列L3/L4 强制性标准体系正逐步建立。
观点三:scaling law 是确定性的技术趋势,端到端架构初步达到 L4 门槛。
2024 年以来国内外头部厂商开始在端到端的技术上进一步加入 language 模型,希望借助 LLM 的发展进一步提高模型的泛化能力以实现 L4 级自动驾驶,但目前关于语言模型在智能驾驶算法架构中的应用方式尚未收敛。我们认为,具体架构的分歧并不构成头部厂商技术路径的本质差异。智能驾驶算法面向 L4 迭代的共识性、确定性的方向是 scaling law,也即扩大模型参数量、用更大规模的数据进行训练。同时,模型的运行频率是影响智能驾驶能力在端侧兑现度的核心掣肘。因此,我们可以得出两个判断:1)端侧算力需求跟随参数量的膨胀而膨胀;2)仅有同时具备软硬一体能力的智驾厂商才能长期处于第一梯队。
观点四: Robotaxi 商业模型得到初步验证,行业即将迎来拐点。
回顾 2025 年,国内外头部传统 L4 厂商已取得区域化运营的成功,验证了用户端对 Robotaxi 的需求。Waymo 运营端进展迅速,在部分城市市占率已对传统网约车平台构成冲击。得益于国内新能源车和高阶辅助驾驶的高速发展为Robotaxi 行业带来便宜的供应链以及各地方政府对路权和牌照的逐步放开,国内头部 Robotaxi 厂商已实现 UE 模型打平。展望 2026 年,特斯拉 Robotaxi 能否去安全员稳定运营仍然是板块最大的催化剂。市场高度关注特斯拉 Robotaxi进展背后本质原因在于特斯拉无论是从技术端还是成本端都更具备 scaling 的潜力,一旦验证成功,将推动行业迎来高阶自动驾驶产业拐点。
投资建议
建议重点关注:1)有能力将量产经验转换为成本优势的智驾系统核心零部件厂商,充分受益于智驾平权 2.0;2)受益于 L2 强监管政策周期的检测类机构;3)长期看有能力实现 L4 级自动驾驶能力的智能驾驶厂商。
风险提示
智驾平权进展不及预期的风险;技术进步不及预期的风险;政策落地不及预期的风险。
+
目录
1. 观点一:智驾平权 2.0,城市 NOA 走向千家万户
1.1 原因:内卷背景下,城市 NOA 开始向 10-20 万价格带渗透
1.2 前提:供应商方案逐渐成熟、产业链降本是大前提
2. 观点二:L2 进入强监管政策周期,L3/L4 法规体系逐步建立
2.1 L2 强监管政策周期下,检测类机构充分受益
2.2 高阶自动驾驶逐步进入立法阶段
3. 观点三:scaling law 是确定性的技术趋势,端到端架构初步达到 L4 门槛
3.1 特斯拉或已初步达到 L4 级自动驾驶门槛
3.2 技术路径的分歧:语言模型的应用方式
3.3 技术路径的确定性趋势:scaling law
3.3.1 模型运行频率是影响智能驾驶响应速度的核心掣肘
3.3.2 影响:端侧算力需求膨胀,强算法厂商走向自研芯片
4. 观点四:Robotaxi 商业模型得到初步验证,行业即将迎来拐点
4.1 国内外头部传统 L4 厂商已取得区域化运营成功
4.2 特斯拉 Robotaxi 有望验证成功,推动行业迎来拐点
5. 相关标的
5.1 小鹏汽车:从乘用车智驾领先到物理 AI 龙头
5.2 理想汽车:组织架构调整下销量有望回升,向具身智能企业加速迈进
5.3中国汽研: 自身投产周期与智能驾驶强监管周期共振
5.4 地平线机器人-W:深度受益于智驾平权升级,有望成长为智驾软硬一体龙头
5.5德赛西威:智驾域控龙头受益于城市 NOA 下沉,Robovan+机器人打开长期成长空间
5.6科博达:智能化+出海龙头标的,域控业务进入收获期
6. 风险提示
正文
1. 观点一:智驾平权 2.0,城市 NOA 走向千家万户
1.1 原因:内卷背景下,城市 NOA 开始向 10-20 万价格带渗透
回顾 2025 年智能驾驶行业发展:1)25 年初头部厂商掀起轰轰烈烈的智驾平权,但是对销量带动有限;2)25 年中之后 L2 进入强监管政策周期,不允许主机厂大肆宣传智驾。而展望 2026 年整车行业又面临补贴退坡、电池涨价等多重压力,因此市场担心主机厂对智能驾驶功能是否会减配。
而我们研究发现,2026 年智驾平权的趋势非但不会放缓,反而会进一步增强。优质的城市 NOA 供给会下放到 10-20w低价格带,行业进入智驾平权 2.0 阶段,支撑智能驾驶赛道基本面依然保持高景气度。背后的本质原因在于以下几点:
1)过去 2-3 年智驾景气度的本质来源是新能源车内卷背景下的主机厂增配,这一强大的供给端驱动力在 2026 年依然存在并且增强。2020 年以来国内自主品牌相继在 10-20 万价格带发布颇有竞争力的新能源车型,该价格带的合资份额已快速下降。根据交强险数据,2020 年 10-20 万价格带的合资份额接近 70%,到 2025 年底已下降至35%,国内自主品牌逐步进入内部竞争的阶段。同时, 新能源转型至今,经历了油改电、新能源路线的初步探索,大多数车企 2024 年-2025 年上市的产品都是其第三代新能源产品,产品力均大幅提升,主流自主品牌在动力性能上的差距缩小。在此背景下,2025 年初以比亚迪为代表的头部厂商将中阶方案高速 NOA 快速下放至 10-20w 价格带。更为重要的是,在 2025Q4 传统主机厂新一轮出牌过程中吉利、奇瑞、长城等厂商更为激进的将城市 NOA下沉至 15w 左右价格带。
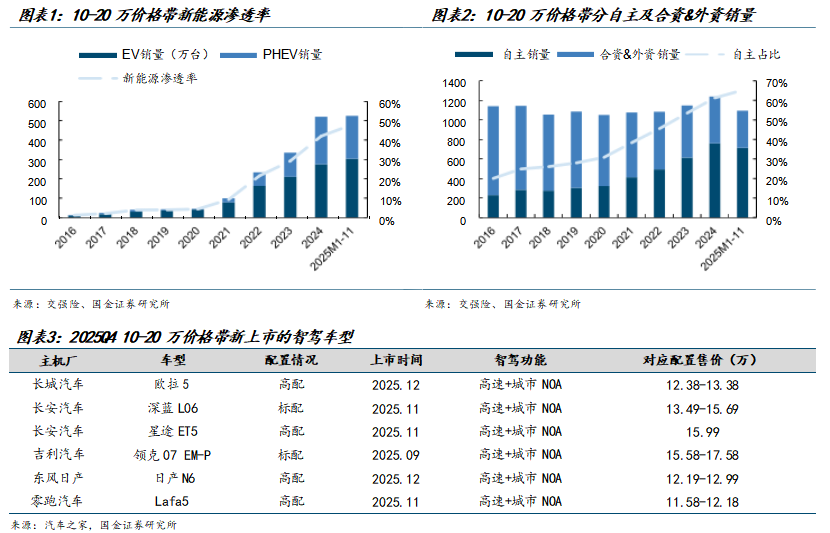
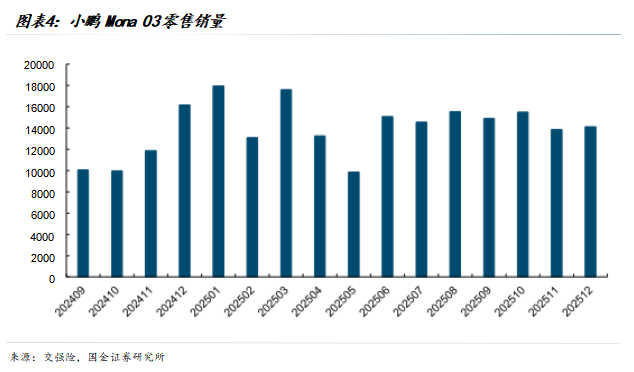
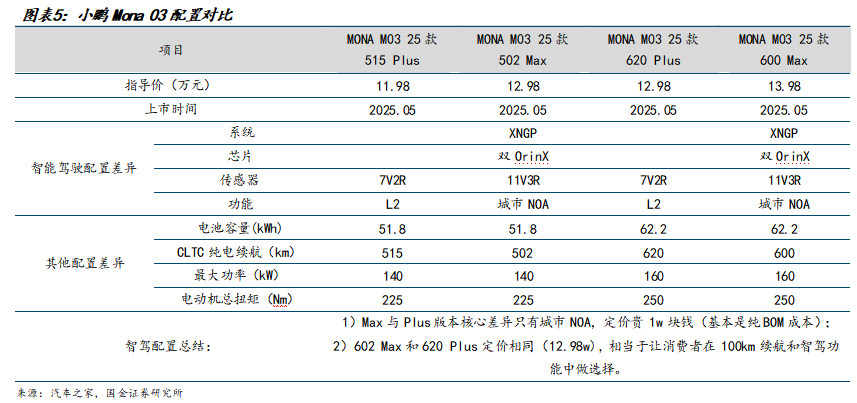
2)10-20w低价格带消费者对智驾并非没有需求,而是需要优质的产品供给。一个典型的例子是小鹏Mona 03,2024年基本版正式上市后凭借年轻化的外观、流畅的车机功能在10-15w价格带大获成功,24年平均月销达到1.2万辆。在M03基础版既定成功的背景下,小鹏在25年5月推出Mona 03 Max版,将行业一梯队的智驾体验下放到15w以内价格带。Max版相较于基础版贵1万元,仅有智驾功能的差异,根据小鹏2025Q2业绩会,新增订单中超过80%的消费者选择了Max版;此外602 Max和620 Plus配置定价相同,均是12.98w,相当于让消费者在100km续航和智驾功能中做选择,根据懂车帝数据,选择了智驾版的消费者远多于选择更高续航的消费者。根据小鹏Mona年度用车报告,93%的小鹏Mona Max版车主使用过NGP功能,90%的小鹏Mona Max版车主使用过人机共驾。
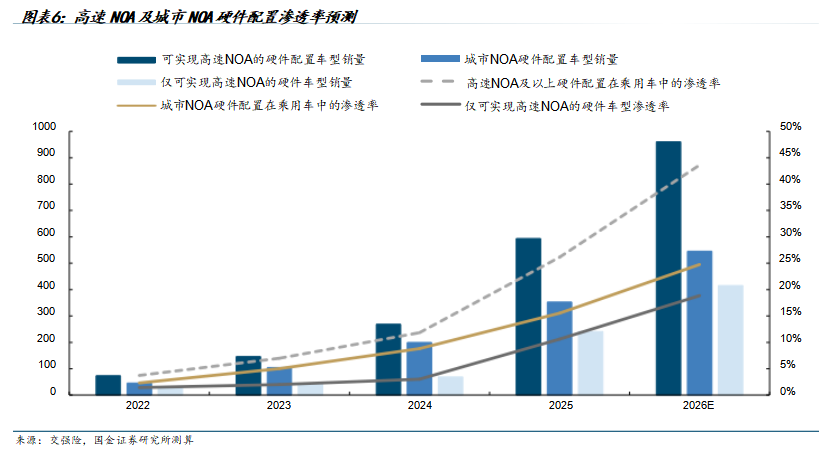
在供给和需求双重驱动力下,2026年优质智能驾驶功能开始走向千家万户。我们测算,2026年高速NOA及以上硬件配置渗透率将从2025年26%提升至44%,城市NOA硬件配置渗透率从2025年16%提升至25%,全年搭载城市NOA功能硬件配置销量有望达到545万,同比增速超过50%。核心假设及测算口径说明:1)汽车行业总量假设:2026年中性假设乘用车/新能源车零售总量分别有望达到2203/1374万台,同比-2%/+12%。总量假设具体测算过程参考我们此前发布过的报告《汽车行业2026年投资策略:智能提速、格局再塑与全球化持续》;2)测算口径为硬件配置口径,即虽然特斯拉FSD在国内尚未全面推送,但其硬件配置本质上具备实现城市NOA的能力,因此同样被计算在内;3)城市NOA依然主要在新能源车中搭载,其中分价格带来看,20万以上的新能源车中城市NOA即将逐步走向标配,10-20万的低价格带新能源车中城市NOA渗透率从26年开始明显提升。
1.2 前提:供应商方案逐渐成熟、产业链降本是大前提
供应商方案逐步成熟,是传统主机厂在 10-20w 搭载高阶智驾功能的前提。2022 年左右特斯拉引领自动驾驶算法出现革命型突破,使得高阶辅助驾驶的大范围落地成为可能。得益于更高效的组织架构、更充足的人才储备,新势力厂商在大模型的开发进展和数据闭环的建立上具有明显优势,2023 年底开始小鹏、理想等主机厂开始角逐城市 NOA 功能的率先落地。而前期在智驾自研积累较为薄弱的部分传统主机厂为保证在旗舰车型上产品功能不落后开始寻求与第三方厂商的合作。以 Momenta、地平线为代表的头部第三方厂商抓住这一机遇,在本身具备匹配的组织和能力的背景下,借助传统主机厂的力量初步构建了数据闭环,完成了冷启动。并在代表项目量产后通过数据闭环持续迭代,在 2025 年供应商方案开始逐步成熟。

降本是智驾系统在低价格带渗透率提升的必要条件。10-20w价格带车型成本敏感度高,根据行业龙头比亚迪2025年三季报测算,剔除比亚迪电子权益贡献后25Q3单车净利润0.54万元。根据中国汽车百人会论坛,主机厂对智驾系统的预算不超过整车售价的5%,按10-20w车型计算,合理成本区间是5000-10000。换言之,能将量产经验转化成成本优质的供应商有望在10-20w市场占据主要份额。根据Momenta曹旭东提出的“智驾行业摩尔定律”,城市NOA功能的硬件门槛,已从23年的超过2w到26年最低有望降低到5千左右,满足这个这个价格带对于智驾系统的预算。
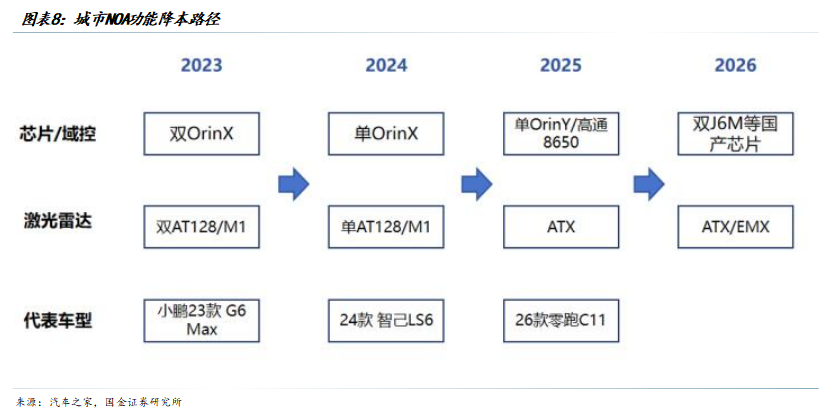
我们认为,主要的降本来源为以下两个方面:
1)极致的软硬一体是最大的降本来源:在高阶辅助驾驶0-1阶段,头部厂商主要基于双OrinX(508Tops)平台落地城市NOA功能,芯片和域控成本价格较高,主要系①彼时仅有英伟达OrinX芯片能支持Transformer架构,具备稀缺性,单Top对应的价格超过1.5美金,溢价较高。②彼时处于算法架构切换初期,行业内对于L2级城市NOA功能最低要求的硬件门槛尚不清楚,因此部分车型存在一定程度的超配,如蔚来搭载了4颗OrinX。随着算法端逐步成熟,行业技术创新开始向后端更底层部分转移,通过算子优化、自研推理引擎等方式压榨芯片算力,24、25年陆续落地了基于单OrinX以及单OrinY/高通8650方案的城市NOA功能,域控成本已大幅降低。与此同时,国内头部第三方厂商开始整合上下游、打造算法+芯片的全栈能力,如算法出身的Momenta组建芯片团队、芯片出身的地平线亦大举投入高阶算法。25年底开始,基于地平线、Momenta极致软硬一体的方案开始陆续落地,城市NOA功能的硬件门槛得以再次降低。
2)激光雷达:从技术降本到规模化降本。根据禾赛2024年度报告,AT128均价接近2800元,而ATX降低到200美金(1400人民币),降幅达到50%。根据国际半导体研究机构TechInsights对禾赛ATX的拆机报告,降本主要来源于以下几个方面:①引入IPE算法(Intelligent Point Cloud Engine)智能点云引擎,通过高频率的信号捕捉,从单次脉冲中分析出更多细节,从而在有限物理通道中模拟出更高密度的点云。②芯片化程度更高,ATX搭载禾赛第四代芯片平台。展望2026年,激光雷达作为一个芯片化程度高的电子件,受规模效应影响大,我们认为激光雷达的降本路径将从技术降本演进为规模化降本。
2.观点二:L2进入强监管政策周期,L3/L4法规体系逐步建立
2.1 L2强监管政策周期下,检测类机构充分受益
L2+的发展阶段逐步从主机厂功能创新进入强监管的政策周期。2023-2024年,随着算法技术变革,行业在L2+辅助驾驶范畴下,进行了大量的功能创新,如定位介于高速NOA和城市NOA之间的LCC增强版、全时ACC、城区通勤模式等,以及定位高于城市NOA的车位到车位动能。但智驾相较于其他功能配置具有以下三个特点:缺乏真正公允、靠谱的评价指标衡量主机厂的能力;用户建立认知的门槛高、学习成本高;智驾功能随着每次OTA变化会有成长性。因此,主机厂为争夺在智驾领域的用户心智纷纷进行大量的宣传,其中不乏有一些模糊辅助驾驶能力边界的不合规营销,甚至由于系统能力不足、驾驶员错误使用导致交通事故。在上述背景之下,2025年起L2级辅助驾驶开始进入强监管的政策周期。

在强监管的政策周期背景下,L2强标是最为重要的落地执行依据。6月4日,全国标准信息公共服务平台公示关于征求《智能网联汽车组合驾驶辅助系统安全要求》拟立项强制性国家标准项目(简称L2强标)意见的通知。9月24日,L2强标征求意见稿挂网,目前进入报批阶段,根据征求意见稿预计在27年1月1日开始正式执行。我国国家标准可以分为推荐性标准(GB/T)和强制性标准(GB)两大类,推标起指导作用不具备约束力,强标则具备法规效应。此前针对L2 ADAS的以推荐性标准为主,《智能网联汽车组合驾驶辅助系统安全要求》是我国首个针对L2 ADAS的强制性标准。根据征求意见稿,L2强标具有以下几个特点:
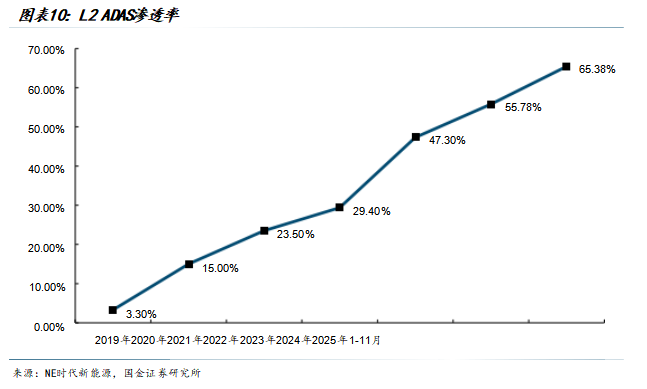
1)覆盖范围广:覆盖整个L2 ADAS范畴,也即同时具备横向和纵向控制能力的ADAS功能都需要满足强标要求,包括基础单车道组合驾驶辅助系统、基础多车道组合驾驶辅助系统和领航组合驾驶辅助系统。根据NE时代新能源数据,2025年1-11月L2及以上渗透率已达到65.38%。
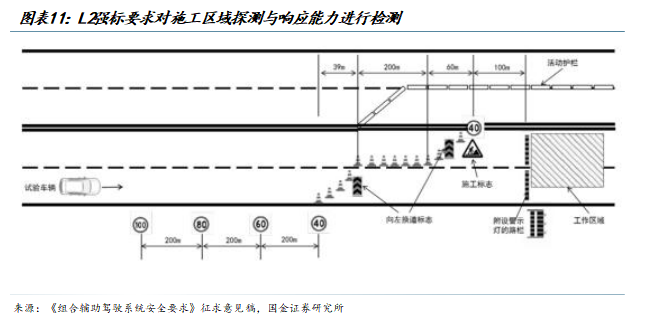
2)测试标准严格:我国汽车标准大体参考欧标,此次L2强标参考欧标R171制定。但相较于R171,我国L2强标在驾驶员状态监测、车端数据记录要求等方面要求提出了更严格的要求。并且基于我国道路的特征和事故场景分析,国标在R171的基础上进一步拓展试验场景,难度明显提升,如增加隧道场景、施工场景的试验检测。
检测类机构受益的确定性强,市场空间明显扩容。我国道路机动车辆实行准入制度,主机厂新车上市之前必须在有资质的第三方检测机构进行强制性标准项目的检测,拿着第三方机构出具的报告才可申报产品准入,即上工信部公告。由于此次L2强标的覆盖范围广、所涉及检测车型多;同时由于测试严格程度强、检测项目多,预计单次检测价值量较高;因此我们预计,在L2强标正式落地后,将带来检测行业市场空间容量明显扩容。从我国L2强制性标准的实施节奏来看,分为两个步骤:27年1月1日起新型式批准的车型要满足标准;28年1月1日已获得型式批准的车型也要满足,即所有的在产车必须满足要求,因此或将在28年带来存量车型脉冲式检测需求。
2.2高阶自动驾驶逐步进入立法阶段
我国L3/L4级自动驾驶正从地方性试验测试向全国性自动驾驶法规体系的建立迈进。2023年11月,工信部、公安部、住建部、交通运输部四部门联合发布《关于开展智能网联汽车准入和上路通行试点工作的通知》。试点的组织过程分为:试点申报——>产品准入——>上路通行试点——>试点暂停与退出——>评估与调整几个阶段。2024年6月,工信部已公布首批试点的联合体;2025年底工信部正式许可首批L3级自动驾驶车型产品开展上路通行试点。
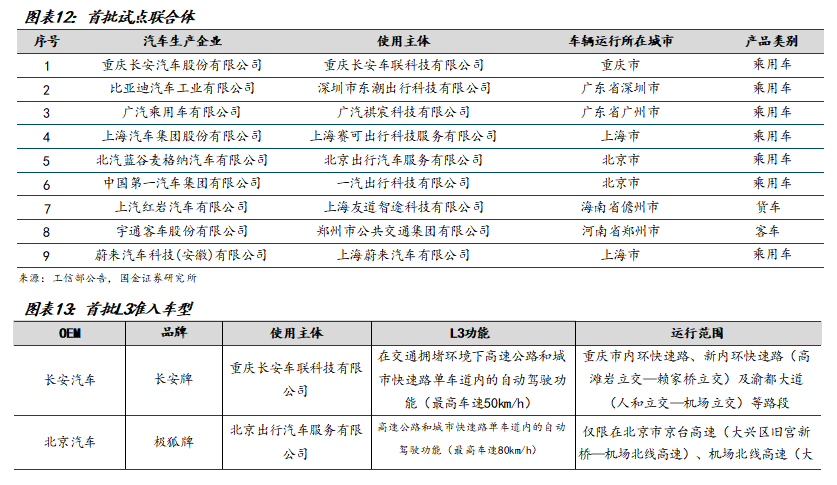

需要说明的是此次准入试点和之前各省市颁发的L3/L4测试或示范应用/运营牌照有本质区别:2021年工信部等部门联合发布《智能网联道路测试和示范应用管理规范》,基于此文件,各省市因地制宜陆续出台对应的实施细则;在此之后我们看到深圳、武汉等地Robotaxi陆续上路测试、运营。需要注意的是,该类文件本质上是规范性文件,鼓励智能网联汽车在公开道路上测试和应用,核心目的是为了验证技术和探索智驾产品形态,因此在上述政策之下,各Robotaxi厂商拿到的牌照为“试验用机动车临时行驶车号牌”。
此次进行智能网联汽车准入和上路通行试点,是在各企业进行道路测试验证产品的基础之上进行遴选,本质目的是为后续相关法律法规、技术标准制修订提供经验和依据。在这样的目标之下,《试点》配套的《实施指南》中进一步明确了汽车生产企业、智能网联产品的准入要求,以及在国家级政策文件中首次明确了事故责任划分标准,意味着我国自动驾驶法规体系的建立正式提上日程。因此,试点联合体取得产品准入进行上路通行的自动驾驶车辆直接挂的是机动车正式牌照,而不是试验用临时牌照。

高级别自动驾驶的大规模商用依赖于一整套法律法规体系的建立。根据SAE自动驾驶分级和我国《驾驶自动化分级》标准,自动驾驶和辅助驾驶的本质差异在于系统是否具备能执行运行范围内全部的动态任务,涉及权责划分突破了现有法规框架,需要一整套法律法规体系的修订或建立。
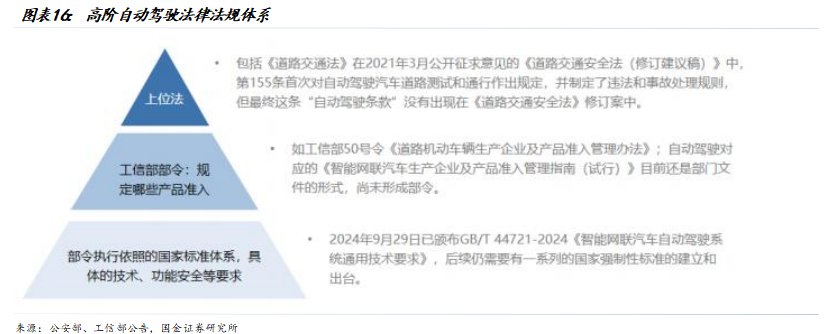
处于最上位的是《道路交通安全法》。此前在2021年3月公开征求意见的《道路交通安全法(修订建议稿)》中,第155条首次对自动驾驶汽车道路测试和通行作出规定,并制定了违法和事故处理规则,但最终这条“自动驾驶条款”没有出现在《道路交通安全法》修订案中。2023年9月,在《十四届全国人大常委会立法规划》中《道交法》修订被列为一类项目;2025年5月,在国务院发布的《国务院2025年度立法工作计划》明确将《道交法》修订列为拟提请全国人大常委会审议的法律案。
自动驾驶车辆的准入还需要国家标准体系的建立。针对L3和L4的自动驾驶强制性标准正逐步建立:《自动驾驶数据记录系统》是第一个自动驾驶强标,已正式颁布,于2026年1月1日正式执行;由工信部牵头的《自动驾驶系统安全要求》强制性标准直接规范自动驾驶系统的技术要求、制造商要求和检验检测方法,影响重大,目前已正式进入起草阶段;由公安部牵头的《智能网联汽车道路通行规定符合性测试内容和方法》亦进入拟立项阶段。
3. 观点三:scaling law 是确定性的技术趋势,端到端架构初步达到 L4 门槛
3.1 特斯拉或已初步达到 L4 级自动驾驶门槛
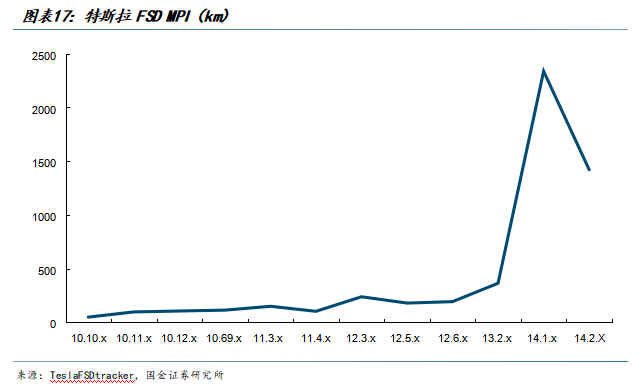
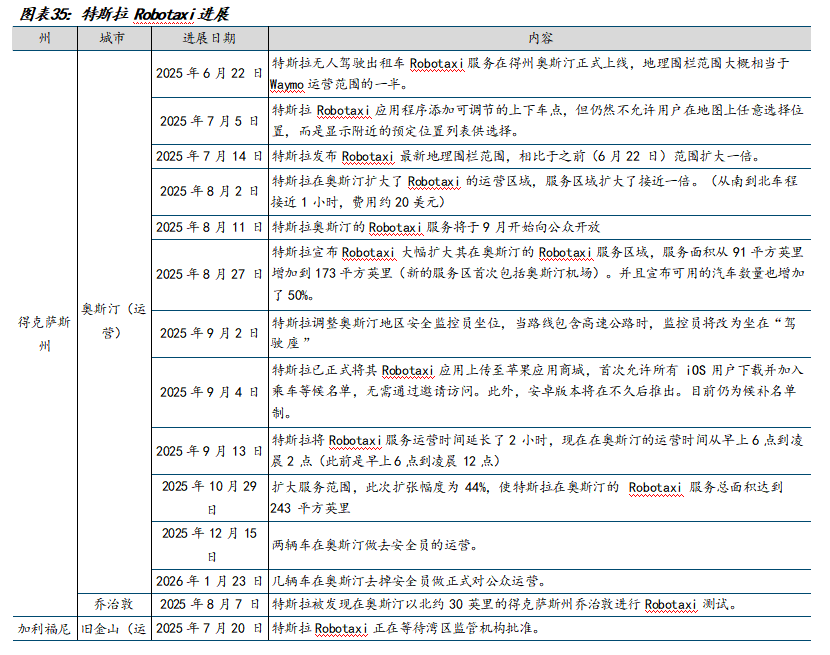
FSD V14.2 平均接管里程大幅提升,特斯拉正逐步接近 L4 级自动驾驶门槛。FSD V14 于 25 年 10 月初正式开始向用户推送,马斯克称 V14 参数量扩大 10x,是 V12 之后的最大版本更新。根据用户路测视频,FSD V14 新增音频输入、对紧急车辆鸣笛会做提前反应,具有强大的场景理解能力、已释放部分推理能力等。我们认为,特斯拉目前正逐步接近L4 级自动驾驶门槛:1)根据 TeslaTrack 小样本跟踪数据,目前 FSD V14.2 用户测试 MP I 超过 1000 公里;近期多名用户使用 FSD 成功完成全程横跨美国东西海岸的驾驶,无需任何人工干预。2)后续将推送 FSD V14.3,马斯克称 14.3允许用户“进入睡眠状态并在目的地被唤醒”(无监督 FSD)。3)25 年底特斯拉 Robotaxi 在奥斯汀开始去安全员做测试。
3.2 技术路径的分歧:语言模型的应用方式
智能驾驶技术发展脉络核心沿着“提高模型泛化性”的要求,尽可能降低遇到 corner case 的概率,进而提高智驾功能的覆盖范围。传统模块化算法基于程序员手写规则驱动,泛化能力差、迭代效率低。随着特斯拉上一代 AI 总监 Andrej将基于神经网络的 software2.0 引入智能驾驶,数据驱动的方法开始分别应用在感知模块、规控模块。在 FSD V12 之后用 one model 统一全栈,智驾进入端到端 1.0 时代,利用数据闭环模型的迭代效果和泛化能力均大幅提升,但依然存在“难以穷尽”的 尾部场景。如果以人学习开车为例,在拿上驾照上路的前三个月里,新手司机其实也会遇到大量的第一次见的场景。人类新手司机可以正确处理这些情况并不是因为每一种场景在驾校都学过,而是因为有这么多年生活经验的积累,可以正确理解这个场景进而做出正确的驾驶决策。但基于数据驱动的端到端模型正是缺少了像人一样的“常识”。
相比较而言多模态大模型具有两个明显优势:
1)语言模型训练数据的丰富程度远远超过自动驾驶,从广泛的互联网数据中学习“世界知识”,像人类一样具有“常识 ”。
2)多模态大模型叠加思维链技术,推理能力强大(具备复杂场景的理解能力),且具备一定的可解释性。
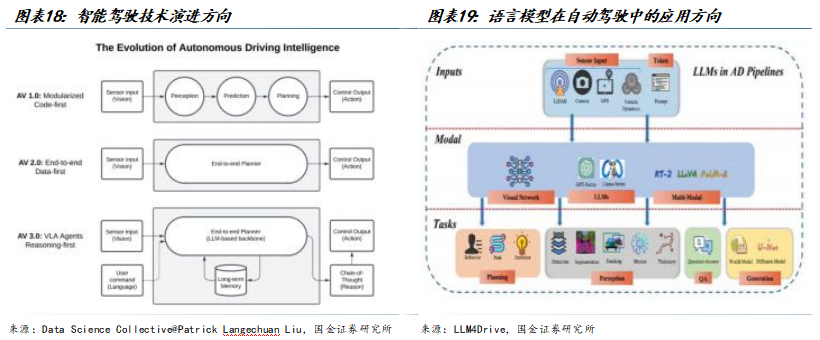
2024 年以来国内外头部厂商开始在端到端的技术上进一步加入 language 模型,希望借助 LLM 的发展进一步提高模型的泛化能力,但目前关于语言模型在智能驾驶算法架构中的应用方式尚未收敛。
语言模型应用的第一阶段:端到端+VLM双系统解耦并行的方案。
理想率先正式提出双系统模型架构,并最早进行了工程化量产。双系统架构中系统一是端到端快系统,类似于人类的肌肉记忆或应激反应,看到对应的场景,就做出什么样的决策和动作,负责轨迹规划的输出。通过模仿人类的驾驶行为来应对各种各样的场景,完全基于数据驱动,中间无需人为设定规则。系统二是 VLM 慢系统,类似于人类的慢思考,比如做思考题或者应用题,人也需要一定的思考时间。在需要文字理解能力、常识的场景中,VLM 会通过思维链 CoT进行分析,给出决策建议。
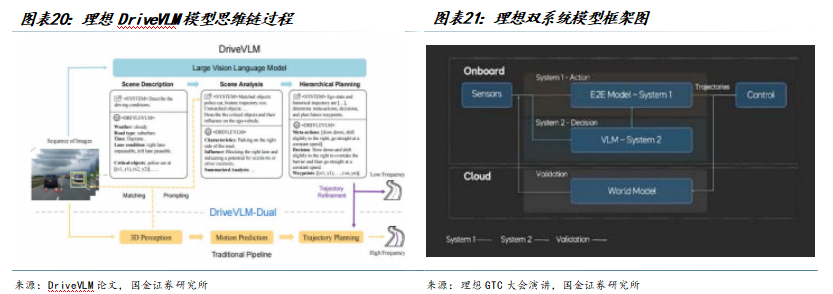
端到端和 VLM 的关系类似于开车的司机旁边有一个驾校的教练,简单场景司机开,有时候教练提醒;司机也可以询问教练的建议。VLM 不做感知和执行(双系统模型里 VLM 不控车,也不是传统意义上的感知),只做场景的理解,给系统一提供的是不精确的指导,输出的内容是提前定义好的元动作(如超车、左转、减速、变道)等,但具体的轨迹规划是端到端做。双系统通过 Prompt 方式进行决策和交互,这个过程包括人为设定的规则和融合条件。且两个独立的模型、运行于不同的频率,整体的联合训练训练和优化较为困难。从实际落地效果看,双系统模型在诸如公交车道、潮汐车道等需要读懂交通标识牌的场景中取得了较好的表现,更多的发挥的是语言模型的“认字”能力,而语言模型强大的场景理解能力和推理能力并没有发挥出来。

语言模型应用的第二个阶段:VLA(视频-语言-动作)大模型融合替代双系统。
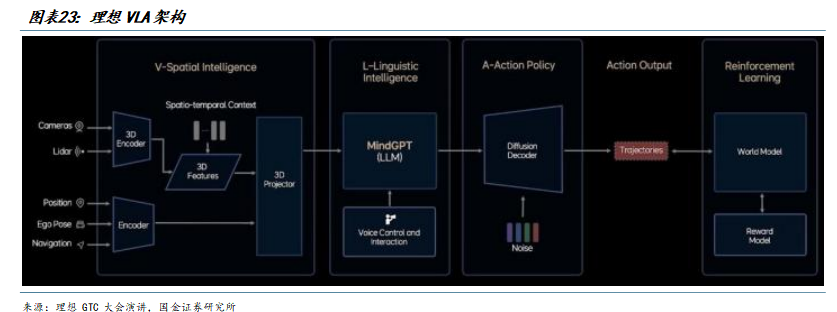
理想:理想 VLA 模型架构本质上就是用 Language model 作为主干网络,视觉和文本特征统一编码融合之后经过语言模块解码出驾驶轨迹和推理逻辑。从训练方式上看分为四个步骤:1)VL(视觉语言)基座预训练阶段:和第三方 language model 的差异在于 Vision 上增加 3D 模态数据、Language 上增加驾驶知识数据、V+L 上增加 3D图文联合数据。2)蒸馏后的 VL 模型做后训练,加入 Action,形成 VLA 模型。这一阶段仍然是模仿学习,类似于人去驾校学开车的过程。3)强化学习:相当于人在社会上开车,通过实践自我迭代驾驶水平。4)搭建司机 Agent,解决自然语言人机交互问题。
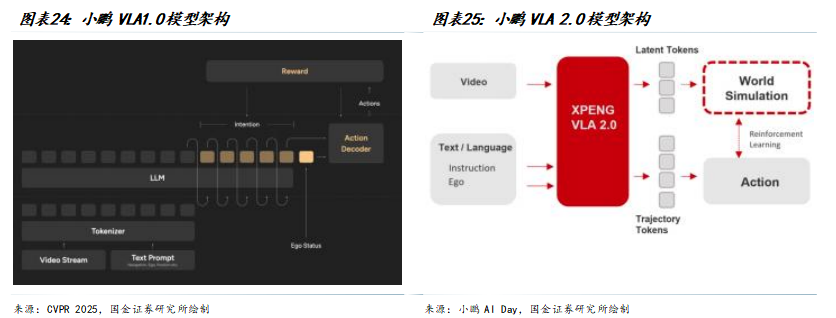
小鹏:小鹏 VLA 1.0 模型架构与理想 VLA 架构类似,即采用预训练的VL 视觉语言模型作为主干网络。但在实践过程中,由于语言模型的输入/输出都是离散化的,难以较好的表达物理世界复杂的连续信号,因此小鹏算法架构迭代至 VLA 2.0。小鹏 VLA 2.0 架构本质上是个 VA 的端到端模型,Language 作为 instruction 的一个输入,而不作为主干网络,Language 的使用主要解决自然语言人机交互指令的问题。
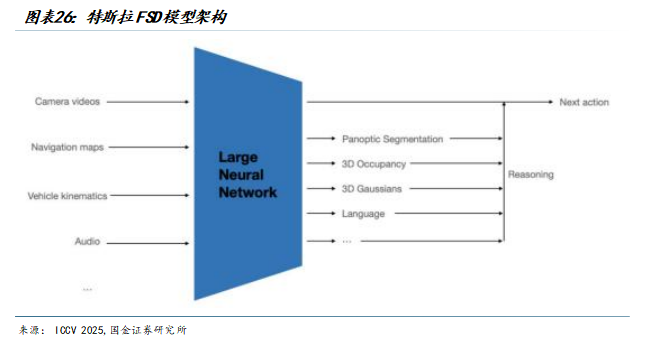
特斯拉:特斯拉从 FSD V12 开始改用单一神经网络模型。虽然是个端到端网络,但也会输出更多的中间结果,来辅助训练、验证安全性和排查错误,其中就包括 Language 表达的决策逻辑。端侧模型运行过程中,如果不需要推理可以直接输出控制动作;如果需要的时候,模型可以思考更久、产生更多推理 token,再输出推理一致的动作。(需要注意的是,根据现有披露信息,无法确定特斯拉 FSD 端到端模型主干网络架构。)
3.3 技术路径的确定性趋势:scaling law
3.3.1 模型运行频率是影响智能驾驶响应速度的核心掣肘
如前所述,目前头部厂商对于 VLA 的模型架构尚未收敛,但我们认为,具体架构的分歧并不构成技术路径的本质差异。从算法角度看,端到端模型唯一重要的是梯度可以一路回传,也即信息的无损传递。因此训练方式的重要性远远大于具体模型具体架构的选择。至于这个端到端系统内部到底有无模块、语言模型是作为 backbone 还是一个 instruction输入,其实更多的是在训练效率、模型收敛速度等等要素之间的权衡。
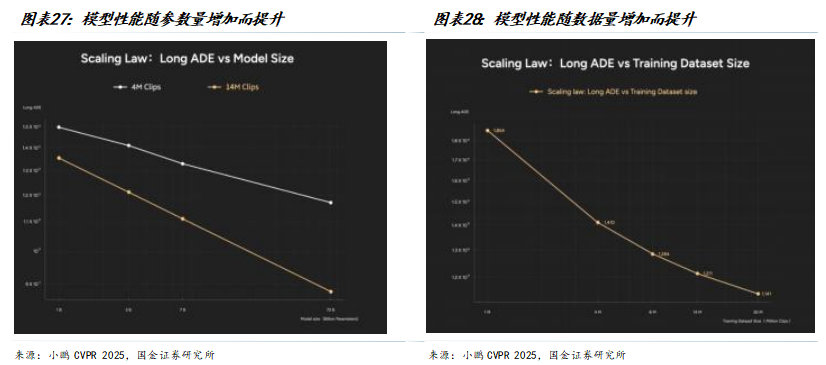
算法往后迭代的共识性、确定性的方向就是 scaling law,云端模型参数量做大,灌更大规模的数据。虽然行业内已经开始担心 scaling law 在大语言模型碰到天花板,但在智能驾驶领域 scaling law 还处于正在被逐步验证的阶段。 FSD 从 V12 版本开始参数量呈现指数级的增长,根据马斯克在 X 上的发言推断 FSD V14 的模型参数量已经达到 V12 第一个版本的 150x(FSD V12.5 相较于 12.4 参数量增加 5x,FSD V13 提高 3x,FSD V14 相较于之前版本参数量提高10x)。国内厂商中小鹏同样已在自动驾驶领域验证 scaling law,根据刘先明在 CVPR 上的演讲,小鹏的实验表明把模型参数规模从 1 亿增加到十亿再到上百亿时,评测指标持续下降,模型表现线性提升;当把数据量从 100 万增加到1000 万甚至是 5 亿时,模型表现也再持续提升,没有出现饱和点。
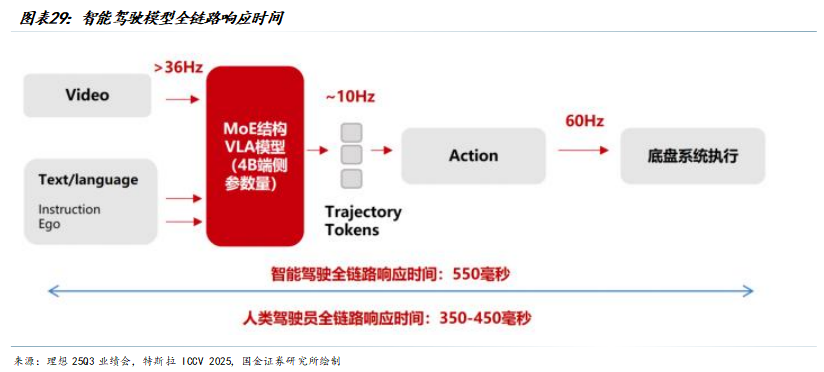
模型的运行频率是影响智能驾驶能力在端侧兑现度的核心掣肘。影响智能驾驶体验的一个核心因素是时延,何小鹏在测评特斯拉 FSD 及 Robotaxi 的视频中表示特斯拉 FSD V14 之所以给人一种丝滑和准 L4 的感觉,是因为它极大的缩短了从视觉感知到动作执行的全链路时延。进一步拆分影响智驾时延的因素:以理想为例,根据李想在 25 年 Q3 业绩会中的介绍,目前理想 4B 的 MoE 模型在 Thor-U 上的运行频率是 10Hz,执行系统的频率是 60Hz;同时参考 Ashok 在 ICCV上的分享,特斯拉摄像头输入频率 36Hz,音频输入频率 42Hz。因此可以很清楚的看到影响智驾系统响应速度最大的因素就是模型的运行效率。而如前所述,scaling law 是确定性、共识性的技术趋势,未来模型参数量将进一步膨胀,端侧的推理时延将面临更大的挑战。所以,根据以上分析,我们可以得出两个判断:1)端侧算力需求将跟随模型参数量的膨胀而膨胀;2)仅有同时具备软硬一体能力的智驾厂商才能长期处于第一梯队。
3.3.2 影响:端侧算力需求膨胀,强算法厂商走向自研芯片
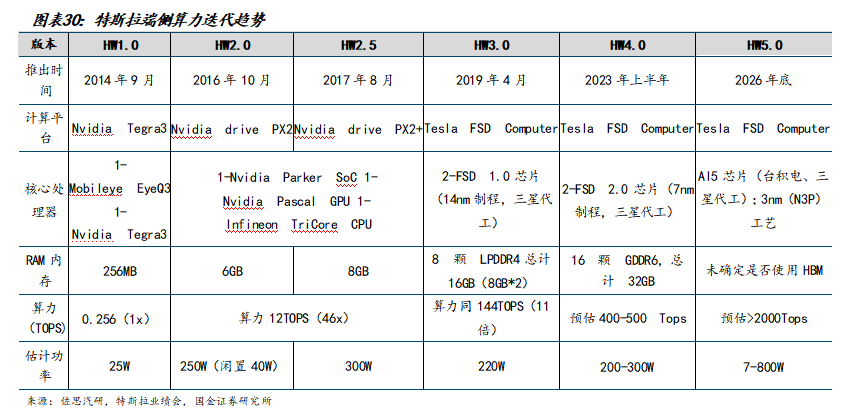
提高模型运行频率的方式之一即加大端侧算力规模,我们预计下一代智驾端侧算力将提高到 2000Tops 以上。根据马斯克在业绩会以及 X 上的发言,特斯拉 AI5 芯片功耗达到 700-800W,对比 AI4 的功耗仅 200W-300W,即便保守假设单位功耗对应的算力没有变化(事实上随着更先进的工艺制程,芯片单位功耗对应的算力会提升,马斯克亦表示过 AI5将实现单瓦最佳性能),AI5 算力规模预计将超过 2000Tops。同时在具体的性能较 AI4 提升 40 倍,带来 8x 算力、9x内存和 5x 带宽提升,并且支持混合精度运算,单颗 AI5 算力相当于 H100 的能力。余凯亦表示,地平线下一代 BPU黎曼架构,关键算子算力性能提升 10 倍。
通用芯片的设计初衷要满足尽可能多的用户需求,导致单一客户在使用的时候往往实际芯片利用率较低。如英伟达OrinX INT8 总算力达到 254Tops,但其实是 DLA 深度学习加速器 87Tops,和 GPU 算力 167Tops 的组合。在理想情况下,主机厂通过自研与软件匹配的芯片硬件能够最大化的提高软硬协同效率。同时,主机厂对于芯片的底层架构的了解程度直接影响算子的优化效率,基于自研芯片主机厂完全掌握底层硬件可以做更深刻的算子优化。如近期特斯拉公布了一个新专利,通过特殊的算子优化方法让 INT8 硬件跑 FP16 的模型,以此进一步延长了 HW3.0 硬件的使用寿命。根据晚点 Auto 报道,理想自研芯片M100 在处理大语言模型的计算任务时,1 颗 M100 所提供的有效算力与2 颗 Thor- U 相当。但自研的风险在于算法迭代周期和芯片研发周期的不匹配(算法基本一年一迭代,芯片研发周期3-4 年),芯片流片回来后可能已不能满足最新的算法需求。因此,自研芯片以提高软硬一体效率的重要前提是主机厂要对智驾算法演进趋势有深刻洞察。
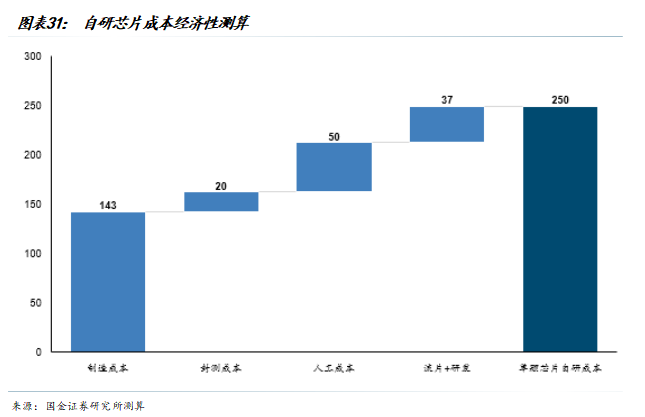
我们测算,主机厂在对算法需求把握正确的前提下,自研芯片具有明显的性价比优势。核心假设及测算依据:1)自研芯片成本包括人员工资、流片等研发过程成本,以及量产阶段的制造和封测成本;2)假设自研芯片定位对标 Thor- U,采用 7nm 制程。根据《电子工程世界》,7nm 芯片单次流片费用达到千万美元。3)根据晚点 Auto,小鹏从 2020 年底开始组建芯片自研团队,首颗芯片在 2025 年正式上车,研发周期约为 4 年。假设主机厂采用相对轻量化的开发方式,200-300 人左右的团队(后端借助外包服务),工程师平均年薪假设 100 万人民币/年。4)主机厂对未来算法需求的判断正确,参考 OrinX 约 3-4 年的生命周期,自研芯片全生命周期出货量超过300 万颗。在上述假设之下,我们测算自研芯片的平均单颗芯片成本为250 美金,相较于外采 Thor-U 具有明显的性价比。
4. 观点四: Robotaxi 商业模型得到初步验证,行业即将迎来拐点
4.1 国内外头部传统 L4 厂商已取得区域化运营成功
海外:2025 年 Waymo 在运营端进展迅速,在部分城市市占率已对传统网约车平台构成冲击,验证了用户端对 Robotaxi的需求。
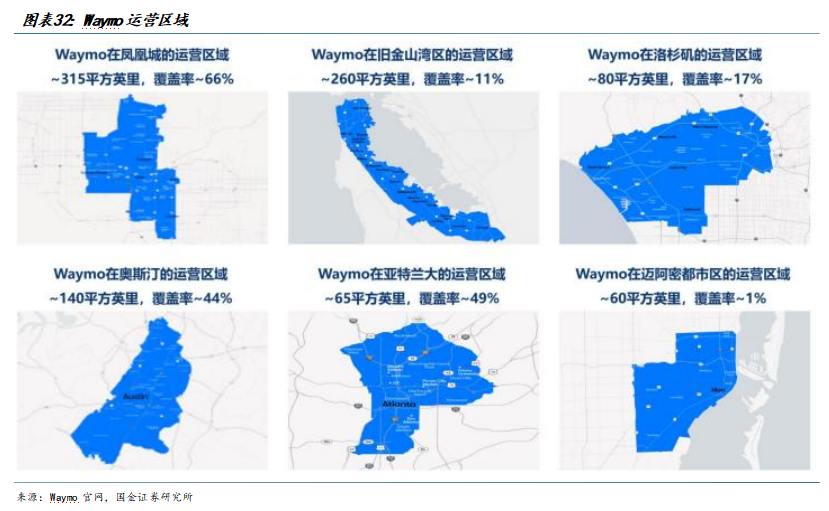
运营范围:截至 2026 年初 Waymo 已经在凤凰城、旧金山、洛杉矶、奥斯汀、亚特兰大和迈阿密六个城市对公众运营,其中迈阿密处于内测阶段,用户需要提前提交申请获得邀请后可体验。从可行驶范围上,目前 Waymo 在凤凰城、旧金山和洛杉矶、奥斯汀、亚特兰大六个城市的运行区域分别为 315、260、80、140、65 和 60 平方英里。
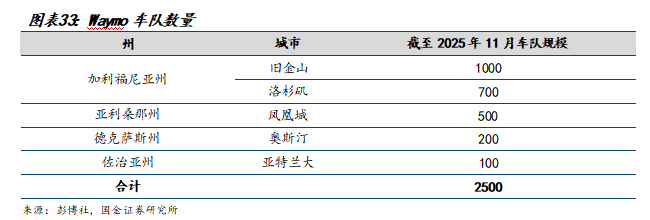
订单量:根据老虎环球基金在致投资者的信函中披露,截至 2025 年底,Waymo 每周提供超过 45 万次付费乘车服务。同时根据彭博社报道,2025 年底Waymo 车队数量约为 2500 辆(旧金山湾区~1000 辆;洛杉矶~700 辆;凤凰城~500 辆;奥斯汀~200 辆;亚特兰大~100 辆),根据上述数据测算,Waymo 当前单车日均订单量超过 25 单。
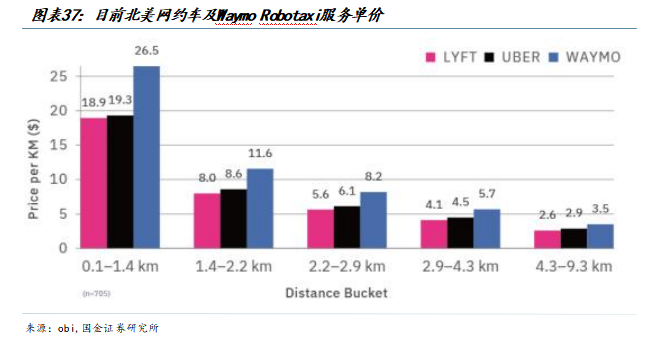
单价:Waymo 未明确披露详细的收费标准,从用户实际付费的角度来看,Waymo 并未像国内 Robotaxi 厂商一样对用户进行大规模的补贴,Waymo 定价相较于 Uber 甚至更贵。
国内:得益于国内新能源车和高阶辅助驾驶的高速发展为 Robotaxi 行业带来便宜的供应链以及各地方政府对路权和牌照的逐步放开,国内头部 Robotaxi 厂商已实现 UE 模型打平。截至 25 年底,小马智行车队规模达到 1159 辆,其中在广州地区的日均营收达到 299 元/辆(已扣除折扣和退款),实现单车UE 模型打平。
成本端:行业发展初期,Robotaxi 车辆主要是基于量产车进行后装改装,除了外购的裸车成本较高,Robotaxi 厂商还需要额外投入改装成本,导致综合成本居高不下。近年来,Robotaxi 车辆的生产方式逐步从后装走向前装,有效降低综合成本。小马智行第五代、第六代 Robotaxi 车型根据丰田雷克萨斯 RX 和丰田赛那进行改装;2023 年8 月,小马智行、丰田中国、广汽丰田三方宣布设立合资公司骓丰,共同推动 Robotaxi 前装量产和规模化部署。智能驾驶套件型号与量产乘用车看齐(激光雷达从机械式向半固态迭代,计算平台从工控机到车规级域控),成本大幅降低。小马第七代自动驾驶套件 BOM 成本相较于上一代下降了70%。
运营端:截至目前,小马智行已获得国内所有一线城市北京、上海、广州、深圳无人示范运营牌照,可对公众收费。根据公司官方公众号,25 年 11 月公司在广州市的单车日均单量已达到 23 单。

4.2 特斯拉 Robotaxi 有望验证成功,推动行业迎来拐点
展望 2026 年,特斯拉 Robotaxi 能否去安全员稳定运营仍然是板块最大的催化剂。特斯拉 2025 年 6 月正式推出Robotaxi,初期主要在奥斯汀和旧金山湾区部署,运营范围的拓张速度远快于同期 Waymo 进展。截至 26 年初,依然以有安全员车辆为主,1 月 23 日,特斯拉 Robotaxi 在奥斯汀开始有车辆去掉安全员对公众运营,但目前占比较低。即便 Waymo 已在多个城市无人运营,但市场上依然对特斯拉去安全员节奏高度关注,背后的本质原因就在于特斯拉无论是从技术端还是成本端都更具备 scaling 的潜力,特斯拉 Robotaxi 一旦验证成功,自动驾驶将成为特斯拉的现金奶牛业务。
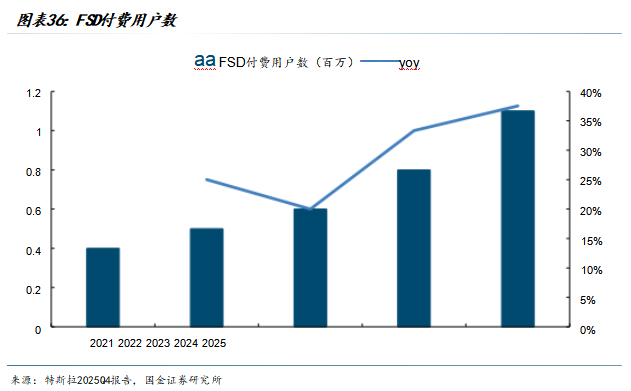
无监督FSD有望快速推出:特斯拉FSD和Robotaxi本质上基于同样的技术栈,只不过目前还是不同版本分支。因此,特斯拉Robotaxi验证成功意味着FSD很快会进入无监督时代,FSD的用户价值将大幅提升。FSD在有监督阶段,已经具备一定的商业化基础。截至2025年底,特斯拉FSD付费用户已经达到110万。预计随着无监督FSD的推出订阅率有望快速提升。
特斯拉Robotaxi车队数量有望快速起量:网约车是一个典型的密度经济,通过规模效应在用户和司机建立起双边网络,传统网约车撬动任意一边都需要巨大的成本。对特斯拉而言,一方面得益于OEM制造能力,另一方面特斯拉采用Airbnb*Robotaxi的商业模式,特斯拉车主可以将其车辆加入Robotaxi车队,因此特斯拉可以短时间内建立起运力。同时,北美网约车价格高、人工成本高,特斯拉Robotaxi单英里成本大幅降低,可以通过明显的价格优势迅速撬动市场。
5.相关标的
5.1小鹏汽车:从乘用车智驾领先到物理AI龙头
物理AI商业化路径清晰,有望从乘用车智驾领先企业成长为物理AI龙头。围绕智能驾驶,小鹏已构建起“VLA算法+数据闭环+AI Infra+自研芯片+世界模型”等AI体系化能力,并具备清晰的商业化路径。
to B License授权反哺研发投入:与大众的合作持续深化,23年7月,小鹏与大众宣布将基于G9平台开发两款大众纯电车型;24年4月,签订EEA架构技术合作框架协议并在25年8月宣布扩大合作范围;25年11月小鹏智驾VLA算法+图灵芯片获得大众定点,标志着小鹏和大众作迈向新的合作阶段。在最新的合作中,小鹏相当于大众智驾供应商的角色,但相较于第三方厂商,小鹏是现有技术能力做商业化,几乎无增量研发投入,赚钱效应更强。
Robotaxi市场空间广阔:从产业逻辑上看,特斯拉Robotaxi在美国验证成功证明AI大模型这条技术路线可以实现到L4。Robotaxi是智能驾驶技术最好的载体之一,市场空间广阔。小鹏明年将推出三款Robotaxi前装车型,并和高德深度合作。我们认为,小鹏作为主机厂天然具备整车BOM成本优势,同时AI大模型的技术路径更具备泛化性,预计将在Robotaxi领域取得较大市场份额。
人形机器人打开长期成长空间:从大的分类方式来看,AI可以分为数字世界AI(比如ChatGPT、DeepSeek等)和物理世界AI(具身智能),智能车本身就看作低自由度的特殊机器人。人形机器人和智能驾驶技术栈一脉相承,小鹏基于智驾构建的一系列体系能力均可复用在人形机器人领域,预计2026年底小鹏人形机器人量产。
风险提示:技术进步不及预期的风险,产品推出节奏不及预期的风险。
5.2理想汽车:组织架构调整下销量有望回升,向具身智能企业加速迈进
高端纯电市场潜力大、竞争格局好。随着超充技术的快速迭代、补能体系的多家合力布局,以及纯电相较于混动具备空间大、操控性好等优势,有望加速抢占混动和燃油市场份额、同时也是新能源车主增换购的最优解。i6上市以来订单表现优异、产能瓶颈逐步解决;i8、MEGA产品力优秀,前期经历的风波淡去后有望迎来销量向上;目前超充站已突破3700座,2026年将达4800座,带来更好的补能体验。
AI带来产品体验跃升,有望带动公司价值重估。VLA首个版本已展现出强大的产品体验,增量功能用户感知力强,后续大版本迭代MP I有望大幅提升;座舱算力有望提高,为车机智能体提供硬件支持。理想的MindVLA、车机智能体将重塑智能汽车产品体验,有望拉动销量向上、带动公司价值重估。
持续进行组织体系改革,L系列大改后有望迎来销量回升。2025年公司组织架构多次调整,完成了从研发、供应链、制造到销售、人力资源的全链路重构,三季度业绩会上宣布将彻底回归“创业公司管理方式”;同时2026年L系列将迎来大改(精简SKU,兼顾市场覆盖和供应效率,强化豪华质感升级,全系标配5C、800v等),产品力后进一步提升、L系列有望迎来销量回升。
风险提示:技术进步不及预期的风险,产品推出节奏不及预期的风险等。
5.3中国汽研:自身投产周期与智能驾驶强监管周期共振
中国汽研是我国头部汽车检测类公司,充分受益于L2辅助驾驶进入强监管政策周期。《组合辅助驾驶系统安全要求》强制性标准已公开征求意见,预计27年1月1日正式执行。我国道路机动车辆实行准入制度,主机厂新车上市之前必须在有资质的第三方检测机构进行强制性标准项目的检测,拿着第三方机构出具的报告才可申报产品准入,即上工信部公告。由于此次L2强标的覆盖范围广、所涉及检测车型多;同时由于测试严格程度强、检测项目多,预计单次检测价值量较高;因此我们预计,在L2强标正式落地后,将带来检测行业市场空间容量明显扩容。
中国汽研自身投产周期和智驾强监管政策周期共振。汽研从2022年启动华东总部基地项目建设,计划于2025年底投产。华东基地占地18.9万平方米,项目总投资超过20亿元人民币,重点构建面向智能化、网联化的测试服务能力,并正筹建国家汽车电子通信与软件质量检验检测中心。此外,公司于2025年上半年联合中国质量认证中心共同对南方试验场进行投资,持有南方试验场35.35%的股权,并于认证中心建立一致行动关系,南方试验场成为中国汽研的控股子公司。南方试验场目标建成国内最大的全场景、多功能智能网联试验场,计划于2026年全面建成并投入试运营。
风险提示:政策落地进展不及预期、检测类机构竞争加剧。
5.4地平线机器人-W:深度受益于智驾平权升级,有望成长为智驾软硬一体龙头
2026年智能驾驶细分赛道高景气度维持,地平线持续受益于智驾平权2.0趋势。在新能源车高度内卷的背景之下,比亚迪为代表的头部厂商在25年初推动智驾平权,将高速NOA功能下放到10-20万价格带。并且我们看到在2025Q4其他自主品牌的新一轮出牌中智驾平权的趋势进一步升级进入到2.0阶段,城市NOA开始在低价格带快速渗透。从主机厂规划来看,即便2026年面临补贴退坡、电池涨价等压力,也并未改变主机厂对智驾功能的增配趋势。另一方面,从需求端来看,根据麦肯锡《中国汽车消费者洞察报告》,消费者对于智驾的认知程度、功能满意度以及对更高阶智驾功能的需求程度均在提升。因此,我们认为在供给端和需求端的共同驱动作用下,2026年智驾细分赛道依然保持高景气度,地平线卡位芯片+算法核心环节充分受益于智驾平权升级的产业趋势。
地平线HSD体验优异,从国产智驾芯片龙头逐步成长为高阶智驾综合供应商。1)地平线算法能力强、HSD综合体验对标国内一梯队水平。地平线本身软件基因深厚,从24年7月开始重组智驾算法团队,引入华为苏箐任首席架构师,并大幅加大云端算力规模,坚定端到端技术路径投入。目前搭载地平线HSD的首批车型已量产,综合体验对标国内一梯队水平:纵向控制能力出色,加减速体感线性平顺;U型弯掉头及环岛等复杂场景完成度高,产品功能无断点。2)软硬一体能力带来性价比优势。得益于公司同时具备底层硬件和上层算法能力,对芯片的利用率更高,具备领先于行业的降本能力。10-20万低价格带车型成本敏感度高,公司基于双J6M的HSD方案综合性价比高有望占据较高份额。同时地平线生态合作伙伴基于单J6M进行城市NOA功能的开发,满足更低价格带的配置需求。
风险提示:主机厂对智能驾驶减配的风险、配套车型销量不及预期的风险。
5.5德赛西威:智驾域控龙头受益于城市NOA下沉,Robovan+机器人打开长期成长空间
德赛西威是国内智能驾驶域控龙头,充分受益于城市NOA配置下沉。德赛得益于基于英伟达方案的先发优势,占据国内智驾域控领域龙头位置。根据NE时代新能源数据,2024年德赛域控装机量超过90万套,市场份额28.4%,国内第一,深度绑定理想、小米等核心新势力客户。2025年德赛域控装机量达到154万套,同比超过60%,市场份额25%,在第三方厂商中市占率第一。除英伟达外,德赛亦与高通进行深度合作。25年上海车展期间,德赛与高通宣布深化在ADAS领域的合作,基于高通Snapdragon Ride™平台联合打造面向多种驾驶场景的解决方案。同时,双方基于高通8775P打造的舱驾一体方案已被多家全球领先的汽车品牌应用。
公司基于在智驾领域构建的能力,向Robovan及机器人域控方向拓展,打开公司长期成长空间。
Robovan:25年9月,德赛发布车规级低速无人车品牌川行致远。首款产品S6的平台设计采用车规级全线控底盘和模块化上装,并基于S6的平台底盘能力,可满足工业园区、物流园区、快递配送等不同场景的客户开发出多场景车型。
机器人域控:25年11月,德赛正式发布机器人智能基座AI Cube,集成了高性能计算平台、中间件和算法框架。AI Cube沿用了德赛在辅助驾驶领域成熟的技术架构,采用即插即用的核心板模块化设计;并且将辅助驾驶域控的车规级冗余设计应用在机器人场景。
5.6科博达:智能化+出海龙头标的,域控业务进入收获期
从大众向海外头部客户切换,收购捷克IMI后出海扩产加速。公司与大众合作超二十年,于2004年切入大众供应链、2005年首次获得奥迪氙气大灯镇流器国产化定点、到2007年获得奥迪全球项目定点,与奥迪公司的同步开发,后进入保时捷、宾利、兰博基尼等,跟随保时捷实现LHC、LLP迭代,2024年更是获得大众集团LED五代大灯控制器定点,目前科博达在eFuse、ADAS域控、液晶玻璃调光控制器、内饰灯、空调鼓风机控制器、燃油泵控制器、DCAC、HUB等多个领域与大众集团均有相关深度合作。公司从大众向其他全球龙头客户拓展,宝马、福特、雷诺等收入快速增长,25H1公司海外客户收入占比38%,2025年6月公司收购捷克IMI公司100%股权,2025年11月12日科博达捷克工厂迎来重要里程碑——LSG5产品首件下线仪式隆重举行,随着科博达捷克工厂量产,公司将进一步属地化配套海外主机厂,出海布局加速。
智能科技并表,公司在手智能驾驶域控订单超200亿元。2022年科博达战略参股“智能科技”,提前布局汽车智能化关键技术,2025年公司并表科博达智能科技,智能科技公司专注于汽车智能中央算力平台及相关域控制器的研发,已与Momenta、高通、地平线等全球领先技术企业建立深度合作,成功开发出高性价比的汽车智能化产品解决方案,目前定点项目的产品生命周期销售额超200亿元,获得全球主流汽车品牌的汽车智能中央算力平台及域控制器产品的项目定点,并与多家全球主流车企建立起深度战略合作,同时,公司还将深度参与核心芯片的设计定义与IP定制,与上游半导体产业链共建创新生态。且根据对赌协议,截至2030年科博达智能科技将盈利超6.3亿元,我们认为智能驾驶域控业务上,公司兼具海外客户基础和国内客户量产经验,未来随着L3级智能化升级,公司域控业务收入有望持续翻倍增长。
风险提示:汽车销量不及预期、海外业务拓展不及预期等。
6. 风险提示
1)智驾平权进展不及预期的风险:本文对智驾行业高景气度的判断基于新能源车高度内卷背景下主机厂对智驾功能的持续增配,但2026年整车行业面临补贴退坡、原材料涨价等多重压力,如果主机厂由于价格压力而对智驾功能减配,将带来智驾平权进展不及预期的风险。
2)技术进步不及预期的风险:智能驾驶行业发展阶段高度取决于技术的进步,2022年得益于特斯拉引领的技术范式变革,城市NOA得以大规模落地。当前产业正处于从辅助驾驶向高阶自动驾驶迈进的关键节点,智能驾驶技术层面在端到端的范式下基于scaling law进一步迭代,但目前特斯拉仍未完全验证成功这一代技术能实现L4。
3)政策落地不及预期的风险:高阶自动驾驶的大规模量产依赖于一整套法律法规体系的建立,上位法《道交法》的修订和国标体系的建立目前仍处于早期阶段,落地节奏具有一定的不确定性。
阅读全文
+
报告信息
证券研究报告:《智驾行业2026年投资策略:从辅助驾驶走向物理AI》
报告日期:2026年2月27日
作者:
徐慧雄 SAC执业编号:S1130525110005
者斯琪 SAC执业编号:S1130525120001
>>>查看更多:股市要闻
